The DASCH scanner was designed to scan one 8"×12" plate per minute to a resolution of 2300 DPI. For more information on this unique piece of equipment, see Simcoe et al. (2006). Construction of the scanner was made possible with grant AST-0407380 from the National Science Foundation.
Here’s a video of the scanner in operation:
(Normally, the scanner room is made as dark as possible, but the lights were left on to be able to make the video.)
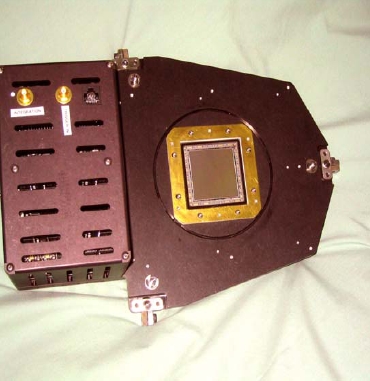
The scanner camera used an ATMEL AT71201M 4K×4K CCD with 11 micron pixels. It is capable of reading out a 12-bit digitized image in 140 msec. The model SI-16M8-FF camera, available commercially from Salvadore Imaging (now FLIR Systems), was generously donated to the project.

The lens was a double telecentric lens from Sill Optics, capable of imaging the full 45mm-square CCD field of view at 1:1 magnification.
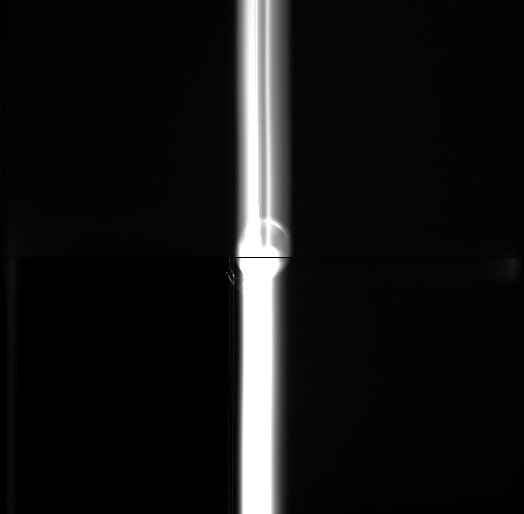
First light from the camera occurred on February 1, 2005. Since the original illumination system proved to be not bright enough, we tested the camera with a single LED. As the camera had no shutter, the image was smeared as it was clocked out of the camera. The gap in the center was eventually closed by adjusting the parameters of the Coreco dual-channel frame grabber, which receives the image from the CameraLink camera interface and transfers it to host memory.
The final illumination source was composed of four Lamina Ceramics red LED arrays containing 117 LEDs per array, or 468 total. The LED arrays were strobed with a 5 amp power supply generating about 120W of power. Typical exposure times were 6 to 50 msec.
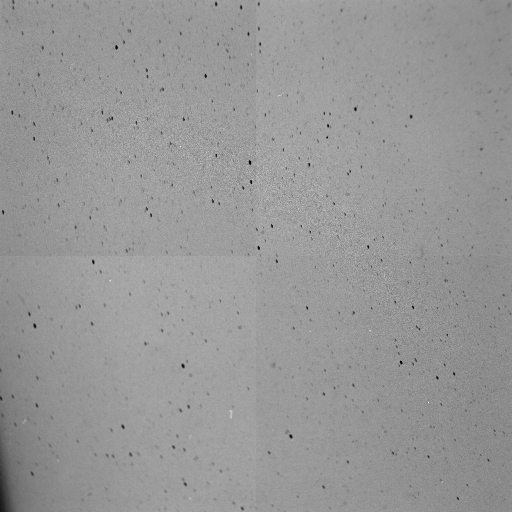
With the new LED strobe system, the first image of a plate was taken on February 24, 2005. Only part of the plate was at focus because of the lack of a proper holder. The different amplifier response of each CCD quadrant is noticable because the image was not flatfielded.

This image shows the Aerotch ABL9000 linear stage at the manufacturer's facility in Blawnox, PA on April 21, 2005. The screw driven stage at the top adjusts the focus height of the camera, which remains fixed while the plate is repositioned underneath for each exposure.

This image shows a detail of the linear stage y-axis North bearing. In the top center is a polished granite surface of the air bearing, which supports one side of the x-axis bearings, which in turn support the plate holder. The motor magnets are just to the right of the air bearing block. In the lower center is a Cer-Vit scale with a 4 micron pitch. A 400× multiplier provides 0.01 micron readout to support the rated stage accuracy of 0.2 microns. During normal scanning, the x-axis drive shifts the plate in 22 mm increments in 300 msec so that each region of the plate is exposed twice. At the end of each horizontal scan, the y-axis drives shift the plate in 44 mm increments in 390 msec.

The linear stage was delivered to Harvard on May 31, 2005. Here the riggers are preparing to navigate the 2,400 pound stage through a four-foot square window and between plate stack support poles spaced 56 inches apart. There are no doors in the basement level of the plate stacks, so this was the only way to get the stage into the scanner room.

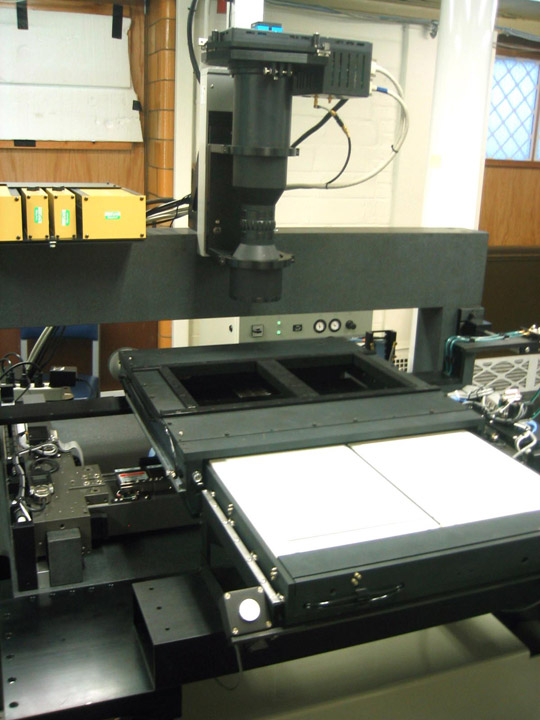
This image shows the scanner shortly after stage delivery. The camera bottom lens is at the top-left center of the image. The bar supporting the LED arrays can be identified by the LED power supply cables running in front of the stage to the bottom-left center.
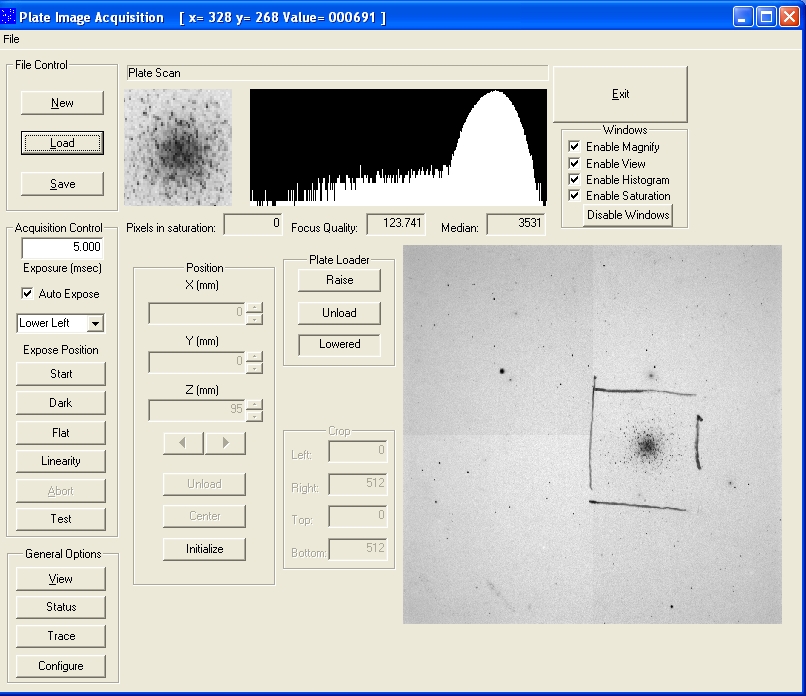
This screenshot of the scanner control window shows the official July 26, 2005 first light exposure of M13, part of plate C12144, which was taken on September 4, 1899 with the 11 inch Draper Refractor in Cambridge. A temporary support positioned the plate for this exposure. The control window shows each tile, a histogram of the tile illumination, and a close-up of selected tile regions.
The plate loader was a separate mechanism installed on the linear stage. Here, the drawer is open in the load position. The two white blocks are made of triple-layered opal glass which support the 8"×10" plates and diffuse the light from the LEDs below. A single block replaces these two blocks for scanning the largest 14"×17" plates.
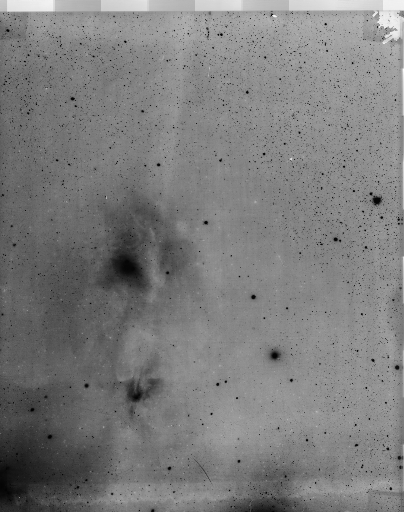
The first complete plate was scanned on November 21, 2005. It was D11023, a positive copy of plate A03690 which captures the Rho Ophiucus complex and was taken on July 8, 1899 from Arequipa, Peru.
The tenth plate, MC05719, was scanned on December 27, 2005. The hundredth plate, RH00758, was scanned on June 20, 2006. The 500th plate, I35197, was scanned on September 8, 2006. Most of these early scans concentrated on the M44 region to test photometry calibration algorithms.
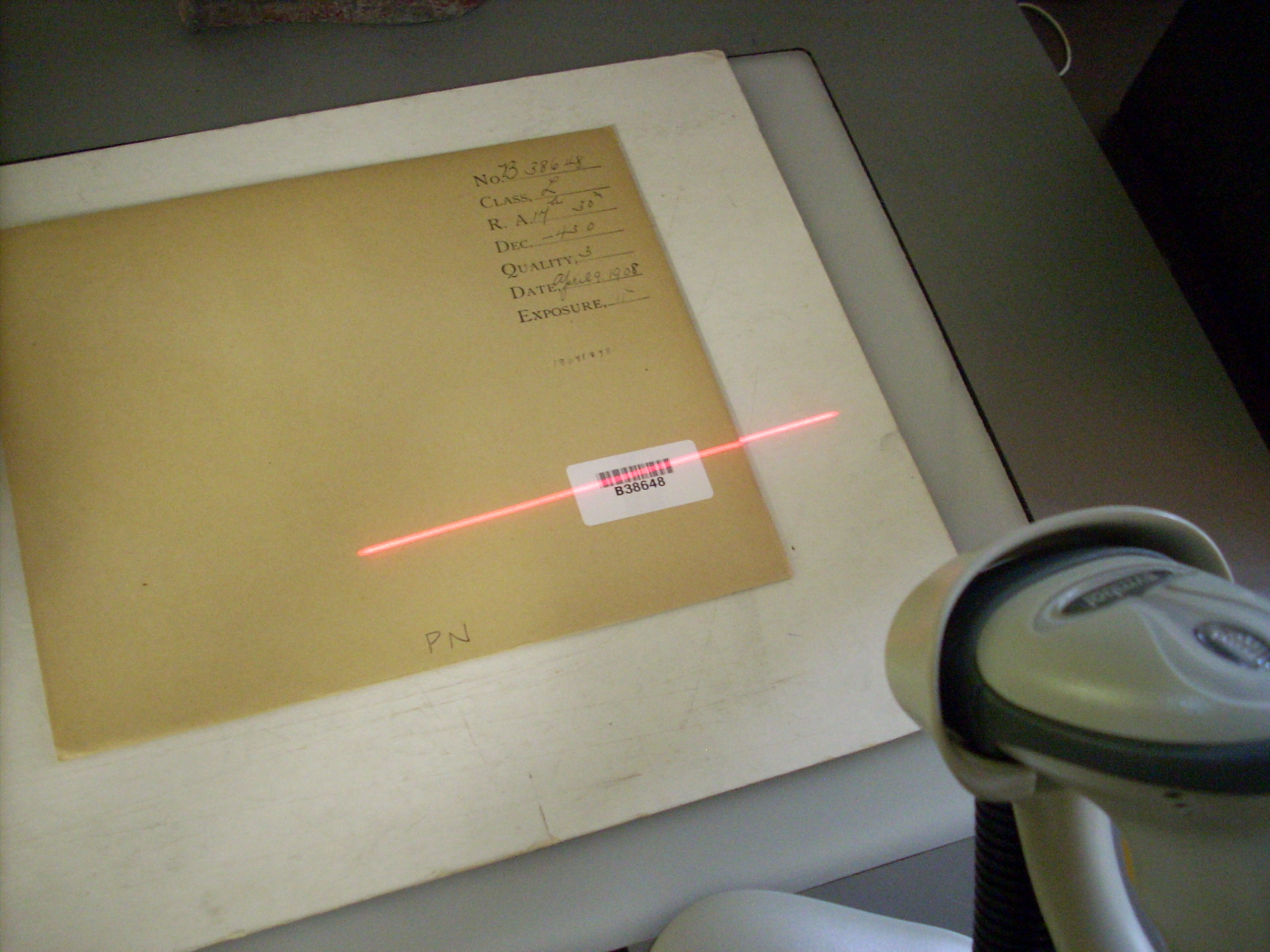
Barcode scanning was introduced in February 2010 to reduce the need for typing and improve tracking of plates.

A new air conditioning system was installed in June 2010 to handle the cooling load of the scanner and servers. The temperature of the scanner electronics became very stable.

On May 19, 2011, DASCH processing moved to Harvard’s Cannon compute cluster. This image shows the installation of the first three dedicated DASCH servers within Harvard’s Boston datacenter. They had a total of 54 TB of effective storage.

On September 14, 2012, the project began backing up all of raw tile and calibration data to LTO-5 magnetic tapes. This image shows the tape library device, which held 22 tape cartridges plus a cleaning tape and a slot for changing tapes.
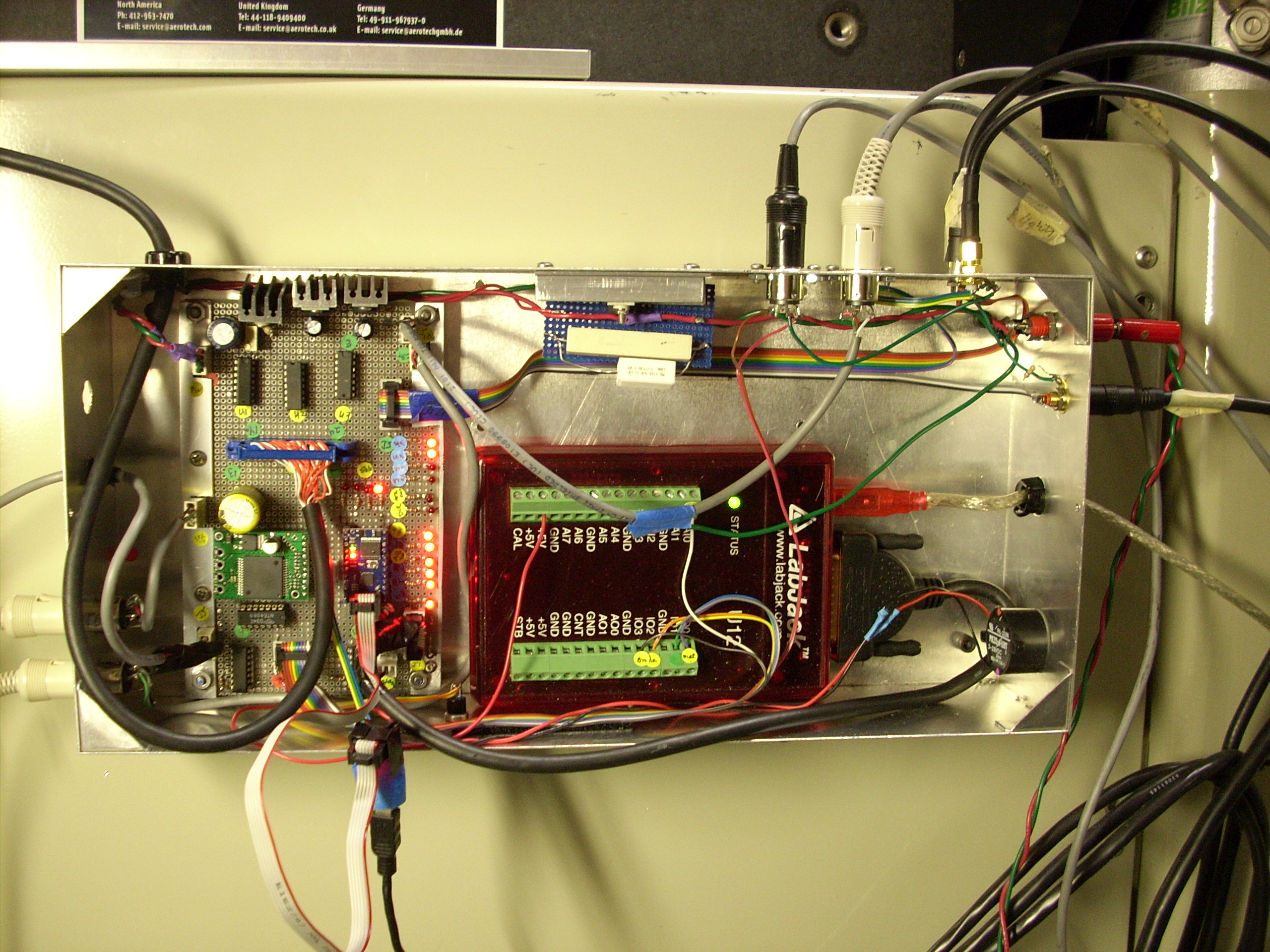
On May 21, 2014 there was an undetected failure of a microswitch in the plate loader mechanism. This event led to a failure of the plate loader drive screw on August 27, 2014. Bob Simcoe replaced the microswitches with Hall effect sensors and completed construction of a new plate loader control box. The new design aimed to provide more timely indications of sensor failure. Scanning resumed on November 6, 2014. The new scanner control box is shown in the image. This box controlled the plate loader, camera triggering, and room lighting. The box also monitored the pressure of the scanner’s compressed-air system and the emergency stop function. The lower right side of the box contained a LabJack U12 interface for communication with the host software. The left side of the box contained a Pololu Baby Orangutan processor for keeping track of the plate loader position using signals from Hall Effect sensors, as well as controlling the plate loader motor.